I want to read a book in a given number of days. I want to read an integer number of chapters each day (there are more chapters than days), no stopping part way through a chapter, and at least 1 chapter each day. The chapters are very non uniform in length (some very short, a few very long, many in between) so I would like to come up with a reading schedule that minimizes the variance of the length of the days readings (read multiple short chapters on the same day, long chapters are the only one read that day). I also want to read through the book in order (no skipping ahead to combine short chapters that are not naturally next to each other.
The data set is the Book of Mormons [2]:
| Chapter | Words | Letters | Verses | Chapter | Words | Letters | Verses |
|---|---|---|---|---|---|---|---|
| 1 Nephi 1 | 908 | 3746 | 20 | Alma 26 | 1665 | 6840 | 37 |
| 1 Nephi 2 | 879 | 3640 | 24 | Alma 27 | 1260 | 5294 | 30 |
| 1 Nephi 3 | 1067 | 4295 | 31 | Alma 28 | 575 | 2471 | 14 |
| 1 Nephi 4 | 1262 | 4968 | 38 | Alma 29 | 708 | 2748 | 17 |
| 1 Nephi 5 | 761 | 3202 | 22 | Alma 30 | 2666 | 10762 | 60 |
| 1 Nephi 6 | 202 | 777 | 6 | Alma 31 | 1478 | 6269 | 38 |
| 1 Nephi 7 | 992 | 3941 | 22 | Alma 32 | 1837 | 7479 | 43 |
| 1 Nephi 8 | 1221 | 4769 | 38 | Alma 33 | 855 | 3416 | 23 |
| 1 Nephi 9 | 259 | 1075 | 6 | Alma 34 | 1576 | 6477 | 41 |
| 1 Nephi 10 | 924 | 3829 | 22 | Alma 35 | 699 | 3043 | 16 |
| 1 Nephi 11 | 1315 | 5159 | 36 | Alma 36 | 1229 | 4719 | 30 |
| 1 Nephi 12 | 860 | 3527 | 23 | Alma 37 | 2027 | 8764 | 47 |
| 1 Nephi 13 | 1899 | 7874 | 42 | Alma 38 | 651 | 2494 | 15 |
| 1 Nephi 14 | 1284 | 5236 | 30 | Alma 39 | 793 | 3168 | 19 |
| 1 Nephi 15 | 1488 | 6149 | 36 | Alma 40 | 1153 | 4790 | 26 |
| 1 Nephi 16 | 1618 | 6555 | 39 | Alma 41 | 701 | 2983 | 15 |
| 1 Nephi 17 | 2523 | 10180 | 55 | Alma 42 | 1229 | 5129 | 31 |
| 1 Nephi 18 | 1217 | 4960 | 25 | Alma 43 | 2221 | 9795 | 54 |
| 1 Nephi 19 | 1292 | 5399 | 24 | Alma 44 | 1243 | 5043 | 24 |
| 1 Nephi 20 | 698 | 2767 | 22 | Alma 45 | 911 | 3913 | 24 |
| 1 Nephi 21 | 945 | 3758 | 26 | Alma 46 | 1809 | 7635 | 41 |
| 1 Nephi 22 | 1506 | 6275 | 31 | Alma 47 | 1572 | 6693 | 36 |
| 2 Nephi 1 | 1543 | 6391 | 32 | Alma 48 | 1073 | 4669 | 25 |
| 2 Nephi 2 | 1460 | 6151 | 30 | Alma 49 | 1345 | 5968 | 30 |
| 2 Nephi 3 | 1170 | 4685 | 25 | Alma 50 | 1734 | 7508 | 40 |
| 2 Nephi 4 | 1300 | 5267 | 35 | Alma 51 | 1682 | 7271 | 37 |
| 2 Nephi 5 | 1169 | 4767 | 34 | Alma 52 | 1757 | 7543 | 40 |
| 2 Nephi 6 | 895 | 3780 | 18 | Alma 53 | 1085 | 4730 | 23 |
| 2 Nephi 7 | 405 | 1574 | 11 | Alma 54 | 988 | 4095 | 24 |
| 2 Nephi 8 | 812 | 3261 | 25 | Alma 55 | 1218 | 5152 | 35 |
| 2 Nephi 9 | 2388 | 9985 | 54 | Alma 56 | 2177 | 9129 | 57 |
| 2 Nephi 10 | 966 | 4106 | 25 | Alma 57 | 1517 | 6395 | 36 |
| 2 Nephi 11 | 338 | 1332 | 8 | Alma 58 | 1748 | 7357 | 41 |
| 2 Nephi 12 | 647 | 2557 | 22 | Alma 59 | 489 | 2166 | 13 |
| 2 Nephi 13 | 587 | 2454 | 26 | Alma 60 | 1777 | 7512 | 36 |
| 2 Nephi 14 | 203 | 810 | 6 | Alma 61 | 854 | 3544 | 21 |
| 2 Nephi 15 | 857 | 3540 | 30 | Alma 62 | 2220 | 9554 | 52 |
| 2 Nephi 16 | 370 | 1406 | 13 | Alma 63 | 593 | 2505 | 17 |
| 2 Nephi 17 | 687 | 2668 | 25 | Helaman 1 | 1418 | 6171 | 34 |
| 2 Nephi 18 | 570 | 2304 | 22 | Helaman 2 | 599 | 2568 | 14 |
| 2 Nephi 19 | 587 | 2474 | 21 | Helaman 3 | 1527 | 6542 | 37 |
| 2 Nephi 20 | 928 | 3715 | 34 | Helaman 4 | 1076 | 4781 | 26 |
| 2 Nephi 21 | 520 | 2090 | 16 | Helaman 5 | 2084 | 8655 | 52 |
| 2 Nephi 22 | 134 | 533 | 6 | Helaman 6 | 1797 | 7721 | 41 |
| 2 Nephi 23 | 587 | 2442 | 22 | Helaman 7 | 1142 | 4751 | 29 |
| 2 Nephi 24 | 891 | 3587 | 32 | Helaman 8 | 1210 | 5134 | 28 |
| 2 Nephi 25 | 1699 | 7294 | 30 | Helaman 9 | 1480 | 6032 | 41 |
| 2 Nephi 26 | 1483 | 6363 | 33 | Helaman 10 | 720 | 3013 | 19 |
| 2 Nephi 27 | 1461 | 5809 | 35 | Helaman 11 | 1561 | 6536 | 38 |
| 2 Nephi 28 | 1240 | 4997 | 32 | Helaman 12 | 873 | 3504 | 26 |
| 2 Nephi 29 | 804 | 3197 | 14 | Helaman 13 | 1855 | 7527 | 39 |
| 2 Nephi 30 | 708 | 2941 | 18 | Helaman 14 | 1241 | 5106 | 31 |
| 2 Nephi 31 | 988 | 4065 | 21 | Helaman 15 | 824 | 3607 | 17 |
| 2 Nephi 32 | 426 | 1743 | 9 | Helaman 16 | 1025 | 4247 | 25 |
| 2 Nephi 33 | 647 | 2539 | 15 | 3 Nephi 1 | 1340 | 5524 | 30 |
| Jacob 1 | 719 | 3149 | 19 | 3 Nephi 2 | 769 | 3404 | 19 |
| Jacob 2 | 1365 | 5815 | 35 | 3 Nephi 3 | 1353 | 5947 | 26 |
| Jacob 3 | 619 | 2765 | 14 | 3 Nephi 4 | 1518 | 6506 | 33 |
| Jacob 4 | 929 | 4027 | 18 | 3 Nephi 5 | 931 | 3891 | 26 |
| Jacob 5 | 3758 | 15366 | 77 | 3 Nephi 6 | 1200 | 5256 | 30 |
| Jacob 6 | 511 | 2091 | 13 | 3 Nephi 7 | 1132 | 4944 | 26 |
| Jacob 7 | 1242 | 4988 | 27 | 3 Nephi 8 | 871 | 3700 | 25 |
| Enos 1 | 1160 | 4730 | 27 | 3 Nephi 9 | 965 | 4006 | 22 |
| Jarom 1 | 734 | 3149 | 15 | 3 Nephi 10 | 807 | 3392 | 19 |
| Omni 1 | 1398 | 5906 | 30 | 3 Nephi 11 | 1434 | 5732 | 41 |
| Words of Mormon 1 | 857 | 3704 | 18 | 3 Nephi 12 | 1294 | 5185 | 48 |
| Mosiah 1 | 966 | 4188 | 18 | 3 Nephi 13 | 834 | 3402 | 34 |
| Mosiah 2 | 2112 | 8675 | 41 | 3 Nephi 14 | 628 | 2451 | 27 |
| Mosiah 3 | 1117 | 4771 | 27 | 3 Nephi 15 | 731 | 2962 | 24 |
| Mosiah 4 | 1605 | 6586 | 30 | 3 Nephi 16 | 913 | 3679 | 20 |
| Mosiah 5 | 740 | 2965 | 15 | 3 Nephi 17 | 879 | 3550 | 25 |
| Mosiah 6 | 309 | 1313 | 7 | 3 Nephi 18 | 1344 | 5429 | 39 |
| Mosiah 7 | 1555 | 6326 | 33 | 3 Nephi 19 | 1233 | 5083 | 36 |
| Mosiah 8 | 938 | 3948 | 21 | 3 Nephi 20 | 1538 | 6354 | 46 |
| Mosiah 9 | 864 | 3489 | 19 | 3 Nephi 21 | 1155 | 4659 | 29 |
| Mosiah 10 | 957 | 3942 | 22 | 3 Nephi 22 | 507 | 2155 | 17 |
| Mosiah 11 | 1271 | 5205 | 29 | 3 Nephi 23 | 415 | 1754 | 14 |
| Mosiah 12 | 1291 | 5309 | 37 | 3 Nephi 24 | 620 | 2496 | 18 |
| Mosiah 13 | 1073 | 4300 | 35 | 3 Nephi 25 | 183 | 721 | 6 |
| Mosiah 14 | 391 | 1574 | 12 | 3 Nephi 26 | 793 | 3326 | 21 |
| Mosiah 15 | 1056 | 4559 | 31 | 3 Nephi 27 | 1269 | 4917 | 33 |
| Mosiah 16 | 560 | 2393 | 15 | 3 Nephi 28 | 1457 | 5856 | 39 |
| Mosiah 17 | 650 | 2655 | 20 | 3 Nephi 29 | 394 | 1589 | 9 |
| Mosiah 18 | 1382 | 5755 | 35 | 3 Nephi 30 | 130 | 564 | 2 |
| Mosiah 19 | 978 | 4070 | 29 | 4 Nephi 1 | 1949 | 8300 | 49 |
| Mosiah 20 | 963 | 4027 | 26 | Mormon 1 | 706 | 2987 | 19 |
| Mosiah 21 | 1328 | 5649 | 36 | Mormon 2 | 1262 | 5317 | 29 |
| Mosiah 22 | 620 | 2651 | 16 | Mormon 3 | 939 | 3820 | 22 |
| Mosiah 23 | 1186 | 4978 | 39 | Mormon 4 | 822 | 3595 | 23 |
| Mosiah 24 | 954 | 3970 | 25 | Mormon 5 | 1067 | 4483 | 24 |
| Mosiah 25 | 837 | 3610 | 24 | Mormon 6 | 914 | 3664 | 22 |
| Mosiah 26 | 1200 | 5112 | 39 | Mormon 7 | 454 | 1805 | 10 |
| Mosiah 27 | 1601 | 6733 | 37 | Mormon 8 | 1710 | 6931 | 41 |
| Mosiah 28 | 812 | 3513 | 20 | Mormon 9 | 1510 | 6225 | 37 |
| Mosiah 29 | 1879 | 7990 | 47 | Ether 1 | 901 | 3508 | 43 |
| Alma 1 | 1496 | 6356 | 33 | Ether 2 | 1370 | 5481 | 25 |
| Alma 2 | 1433 | 6179 | 38 | Ether 3 | 1253 | 5007 | 28 |
| Alma 3 | 1016 | 4340 | 27 | Ether 4 | 892 | 3623 | 19 |
| Alma 4 | 1035 | 4432 | 20 | Ether 5 | 226 | 891 | 6 |
| Alma 5 | 2787 | 11260 | 62 | Ether 6 | 1048 | 4265 | 30 |
| Alma 6 | 390 | 1657 | 8 | Ether 7 | 899 | 3746 | 27 |
| Alma 7 | 1443 | 5913 | 27 | Ether 8 | 1231 | 5041 | 26 |
| Alma 8 | 1231 | 5033 | 32 | Ether 9 | 1424 | 5823 | 35 |
| Alma 9 | 1511 | 6274 | 34 | Ether 10 | 1415 | 5726 | 34 |
| Alma 10 | 1442 | 5835 | 32 | Ether 11 | 762 | 3238 | 23 |
| Alma 11 | 1466 | 5865 | 46 | Ether 12 | 1536 | 6443 | 41 |
| Alma 12 | 1858 | 7802 | 37 | Ether 13 | 1219 | 5053 | 31 |
| Alma 13 | 1347 | 5776 | 31 | Ether 14 | 1132 | 4664 | 31 |
| Alma 14 | 1526 | 6295 | 29 | Ether 15 | 1314 | 5370 | 34 |
| Alma 15 | 711 | 3034 | 19 | Moroni 1 | 147 | 614 | 4 |
| Alma 16 | 1010 | 4383 | 21 | Moroni 2 | 119 | 459 | 3 |
| Alma 17 | 1848 | 7842 | 39 | Moroni 3 | 120 | 491 | 4 |
| Alma 18 | 1623 | 6659 | 43 | Moroni 4 | 153 | 629 | 3 |
| Alma 19 | 1701 | 6905 | 36 | Moroni 5 | 91 | 351 | 2 |
| Alma 20 | 1279 | 5104 | 30 | Moroni 6 | 335 | 1457 | 9 |
| Alma 21 | 955 | 4162 | 23 | Moroni 7 | 1929 | 7812 | 48 |
| Alma 22 | 1871 | 7733 | 35 | Moroni 8 | 1064 | 4677 | 30 |
| Alma 23 | 764 | 3321 | 18 | Moroni 9 | 1012 | 4305 | 26 |
| Alma 24 | 1509 | 6241 | 30 | Moroni 10 | 1149 | 4603 | 34 |
| Alma 25 | 752 | 3212 | 17 |
Some additional data:
- The number of days available is \(T=128\).
- The number of chapters to read is \(n=239\).
- We can minimize the variance of any of the quantities verses, words or letters. Here I use verses.
- The total number of verses is \(\sum_i v_i = 6603\).
- The average number of verses we want read per day is:\[\mu = \frac{\sum_i v_i}{T}= 51.6\]
- I add the constraint we want to read at least one chapter per day.
- We define the objective to minimize as: \[\min z=\sum_t (nv_t-\mu)^2\] where \(nv_t\) is the number of verses we read during day \(t\).
This is not a very small problem.
Method 1: Dynamic Programming
A dynamic programming approach is found in an answer provided in [1]. Let:
\(f_{i,t} = \) SSQ of optimal schedule when reading chapters \(1,\dots,i\) in \(t\) days.
where SSQ means sum of squares objective. This leads to the recursion:
\[\bbox[lightcyan,10px,border:3px
solid darkblue]{\large{f_{i,t} = \min_{k=t-1,\dots,i-1} \left\{ f_{k,t-1} + \left( \sum_{j=k+1}^i v_j - \mu\right)^2 \right\} }}\]
Now we just need to evaluate \(f_{n,T}\).
The R code in [1] looks like:
f<-function(X=bom3$Verses,days=128){ # find optimal BOM reading schedule for Greg Snow # minimize variance of quantity to read per day over 128 days # N = length(X) SSQ<- matrix(NA,nrow=days,ncol=N) Cuts <- list() # # SSQ[i,j]: the ssqs about the overall mean for the optimal partition # for i days on the chapters 1 to j # M <- sum(X)/days SSQ[1,] <- (cumsum(X)-M)^2 Cuts[[1]] <- as.list(1:N) for (m in 2:days){ Cuts[[m]]=list() for (n in m:N){ CS = cumsum(X[n:1])[n:1] SSQ1 = (CS-M)^2 j = (m-1):(n-1) TS = SSQ[m-1,j]+(SSQ1[j+1]) SSQ[m,n] = min(TS) k = min(which((min(TS)== TS)))+m-1 Cuts[[m]][[n]] = c(Cuts[[m-1]][[k-1]],n) } } list(SSQ=SSQ[days,N],Cuts=Cuts[[days]][[N]]) }
This runs very fast:
> library(tictoc) > tic() > f() $SSQ [1] 11241.05 $Cuts [1] 2 4 7 9 11 13 15 16 17 19 21 23 25 27 30 31 34 37 39 41 44 46 48 50 [25] 53 56 59 60 62 64 66 68 70 73 75 77 78 80 82 84 86 88 89 91 92 94 95 96 [49] 97 99 100 103 105 106 108 110 112 113 115 117 119 121 124 125 126 127 129 131 132 135 137 138 [73] 140 141 142 144 145 146 148 150 151 152 154 156 157 160 162 163 164 166 167 169 171 173 175 177 [97] 179 181 183 185 186 188 190 192 193 194 196 199 201 204 205 207 209 211 213 214 215 217 220 222 [121] 223 225 226 228 234 236 238 239 > toc() 1.08 sec elapsed >
To see how we can interpret the solution, let's reproduce the objective function value:
> Days <- 128 > mu <- sum(bom3$Verses)/Days > > results <- f() > start <- c(1, head(results$Cuts,-1)+1) > end <- results$Cuts > > verses <- rep(0,Days) > for (i in 1:Days) { + verses[i] <- sum(v[start[i]:end[i]]) + } > > sum( (verses-mu)^2 ) [1] 11241.05
Method 2: A nonlinear Assignment Problem formulation
The model can look like:
\[\bbox[lightcyan,10px,border:3px solid darkblue]{\begin{align} \min&\sum_t \left(nv_t - \mu\right)^2\\ &\sum_t x_{i,t} = 1 && \forall i\\ &\sum_i x_{i,t} \ge 1 && \forall t \\& x_{i,t} = 1 \Rightarrow x_{i+1,t} + x_{i+1,t+1}=1\\ &nv_t = \sum_i x_{i,t} v_i\\ & x_{1,1} = x_{n,T} = 1\\ & x_{i,t} \in \{0,1\} \end{align} }\]
Besides assigning each chapter to a day, we need to establish the ordering:
 |
| A proper schedule |
First we note that we know that the first chapter is read in the first day and the last chapter is read in the last day. This is modeled by fixing \(x_{1,1} = x_{n,T} = 1\). Secondly we have the rule that if \(x_{i,t}=1\) (i.e. chapter \(i\) is read during day \(t\)), then we know that the next chapter \(i+1\) is read during the same day or the next day. This constraint will ensure we build a proper schedule. Formally: \(x_{i,t} = 1 \Rightarrow x_{i+1,t} + x_{i+1,t+1}=1\). The implication can be linearized as: \[ x_{i,t} \le x_{i+1,t} + x_{i+1,t+1} \le 2-x_{i,t}\]
Looking at the allowed patterns, we can actually strengthen this to:
\[ x_{i,t} \le x_{i+1,t} + x_{i+1,t+1} \le 1\]
(this does not seem to help).
This MIQP model is very difficult to solve even with the best available solvers. One of the reasons is that the model is very large: it contains 30,592 binary variables. I am sorry to say this formulation is not very useful. Too bad: I think this formulation has a few interesting wrinkles.
Method 3: A Set Covering Approach
We can look at the problem in a different way. Let
\[x_{i,j} = \begin{cases} 1 & \text{if we read chapters $i$ through $j$}\\ 0 & \text{otherwise} \end{cases}\]
Of course we have \(i \le j \le n\). A set covering type of model can look like:
\[\bbox[lightcyan,10px,border:3px solid darkblue]{\begin{align}\min & \sum_{j\ge i} c_{i,j} x_{i,j}\\ & \sum_{i \le k \le j} x_{i,j} = 1 && \forall k\\ & \sum_{j\ge i} x_{i,j} = T\\ & x_{i,j} \in \{0,1\}\end{align}}\]
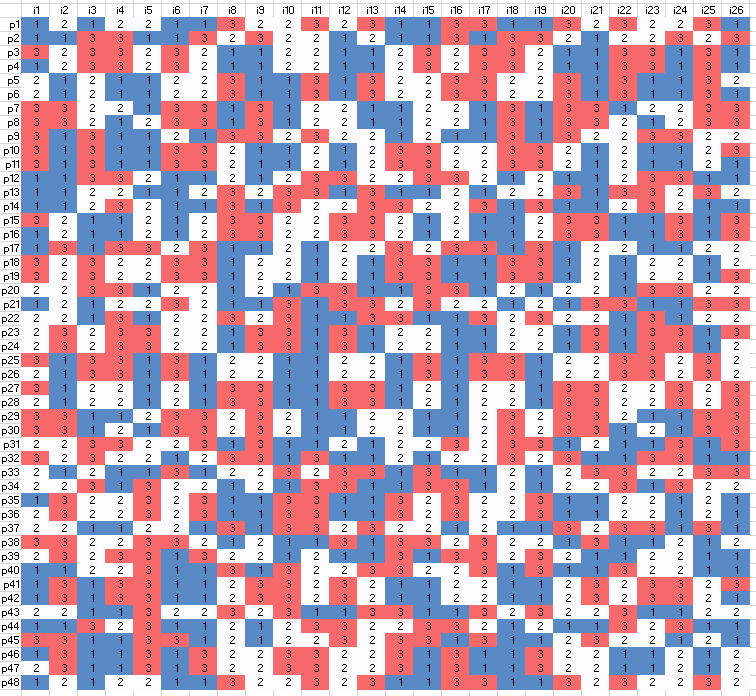
Basically we do the following:
 |
| Covering |
Select \(T\) variables \(x_{i,j}\) such that each chapter is covered exactly once. In the picture above: select \(T\) rows such that each column is covered by exactly one blue cell. On the right we see a feasible solution for \(T=3\) days. The constraint \(\sum_{i \le k \le j} x_{i,j} = 1, \forall k\) counts the number of ones in a column: it should be exactly one. The constraint \(\sum_{j\ge i} x_{i,j} = T\) selects \(T\) variables.
We can slightly optimize things by noting that we can not read more than \(n-T+1\) chapters in a single day. We would finish the book too quickly. Remember, we want to read at least a single chapter each day. So, in advance, we can remove from the problem all variables with more than \(n-T+1\) chapters.
 |
| Before and after preprocessing |
In the picture above we have \(n=4\) and \(T=3\). We can remove all \(x_{i,j}\)'s with length three and longer.
This is now a linear model with binary variables! The variables deal with a whole day, so the quadratic cost is now linear in the decision variables. It turns out to be not a very difficult MIP:
Iteration log . . . Iteration: 1 Dual objective = 2476.602417 Root relaxation solution time = 0.36 sec. (126.25 ticks) Nodes Cuts/ Node Left Objective IInf Best Integer Best Bound ItCnt Gap * 0+ 0 134595.0547 0.0000 100.00% Found incumbent of value 134595.054688 after 9.50 sec. (3892.85 ticks) * 0 0 integral 0 11241.0547 11241.0547 180 0.00% Elapsed time = 9.52 sec. (3899.95 ticks, tree = 0.00 MB, solutions = 2) Found incumbent of value 11241.054688 after 9.52 sec. (3899.95 ticks) Root node processing (before b&c): Real time = 9.53 sec. (3900.78 ticks) Sequential b&c: Real time = 0.00 sec. (0.00 ticks) ------------ Total (root+branch&cut) = 9.53 sec. (3900.78 ticks) MIP status(101): integer optimal solution Cplex Time: 9.53sec (det. 3900.84 ticks)
Not bad, but slower than the Dynamic Programming method.
Note that our optimization: remove all variables \(x_{i,j}\) with number of chapters exceeding \(n-T+1\) really helps:
| Model | Constraints | Variables | Solution time |
|---|---|---|---|
| Original | 240 | 28,680 | 30 seconds |
| Optimized | 240 | 20,552 | 10 seconds |
The presolver does not detect this, so we need to preprocess the problem ourselves.
This model has also a very large number of binary variables, but performs infinitely much better than the previous model. One more indication that just counting variables is not a good measure for difficulty.
Method 4: A Network Model
We can look at this problem as a network [3]:
- The nodes are formed by the chapters plus a sink node. So we have \(n+1\) nodes.
- The arcs \((i,j)\) are interpreted as follows: we have a link \((i,j)\) if we start reading at chapter \(i\) and stop at chapter \(j-1\). I.e. arcs only exist for \(j\gt i\).
- In addition we have arcs \((i,\mathit{sink})\). These arcs correspond to reading all remaining chapters starting at \(i\).
- Each arc \((i,j)\) has a cost \(c_{i,j}\) where \[c_{i,j} = \sum_{k=i}^{j-1} \left(v_k - \mu\right)^2\] The sink can be thought of being chapter \(n+1\).
An example with four chapters can look like:
 |
| Network Representation |
Along the arcs we see which chapters are read. Note there are only forward arcs in this network.
The idea is to solve this as a shortest path problem from "ch1" to "sink" under the condition that we visit \(T\) "blue" nodes. A standard shortest path is easily formulated as an LP [4]:
\[\begin{align} \min&\sum_{(i,j)\in A} c_{i,j} x_{i,j}\\ & \sum_{(j,i)\in A} x_{j,i} + b_i = \sum_{(i,j)\in A} x_{i,j} && \forall i\\ &x_{i,j} \ge 0 \end{align}\]
where \[b_i = \begin{cases} 1 &\text{if $i=\mathit{ch1}$}\\ -1 & \text{if $i=\mathit{sink}$}\\ 0 & \text{otherwise} \end{cases}\]
To make sure we visit \(T\) nodes we split the node balance equation.
\[\bbox[lightcyan,10px,border:3px solid darkblue]{\begin{align} \min&\sum_{(i,j)\in A} c_{i,j} x_{i,j}\\ & \sum_{(j,i)\in A} x_{j,i} + b_i = y_i && \forall i\\ & y_i = \sum_{(i,j)\in A} x_{i,j} && \forall i\\ & \sum_i y_i = T \\ &x_{i,j}, y_i \ge 0 \end{align}}\]
Here \(y_i\) measures the total flow leaving node \(i\) for consumption by other nodes. The set \(A\) is the set of arcs. Again this is now a completely linear model. This model also seems to give integer solutions automatically, so we don't need to use a MIP solver. (Not exactly sure why; I expected we destroyed enough of the network structure this would no longer be the case. To be on the safe side we can solve this as a MIP of course.). The LP model solves very fast:
Tried aggregator 1 time. LP Presolve eliminated 3 rows and 3 columns. Aggregator did 2 substitutions. Reduced LP has 477 rows, 28916 columns, and 58070 nonzeros. Presolve time = 0.06 sec. (13.96 ticks) Initializing dual steep norms . . . Iteration log . . . Iteration: 1 Dual objective = 2509.398865 Iteration: 150 Dual objective = 9379.320313 LP status(1): optimal Cplex Time: 0.11sec (det. 35.60 ticks) Optimal solution found. Objective : 11241.054688
Finally, this version beats the Dynamic Programming algorithm.
We can do slightly better by using the same optimization as in the set covering approach: ignore all \(x_{i,j}\) that correspond to reading more chapters than \(n-T+1\). This leads to a minor improvement in performance:
There is more than one way to skin a cat. These are four very different ways to optimize the reading schedule. If a certain model does not work very well, it makes sense to take a step back and see if you can develop something very different.
We can do slightly better by using the same optimization as in the set covering approach: ignore all \(x_{i,j}\) that correspond to reading more chapters than \(n-T+1\). This leads to a minor improvement in performance:
Tried aggregator 1 time. LP Presolve eliminated 3 rows and 3 columns. Aggregator did 2 substitutions. Reduced LP has 477 rows, 20788 columns, and 41814 nonzeros. Presolve time = 0.05 sec. (10.07 ticks) Initializing dual steep norms . . . Iteration log . . . Iteration: 1 Dual objective = 2580.195313 Iteration: 133 Dual objective = 8804.367188 LP status(1): optimal Cplex Time: 0.08sec (det. 24.21 ticks) Optimal solution found. Objective : 11241.054688
Conclusion
There is more than one way to skin a cat. These are four very different ways to optimize the reading schedule. If a certain model does not work very well, it makes sense to take a step back and see if you can develop something very different.
Resulting schedule
| Day | Chapters | Verses | Cost |
|---|---|---|---|
| Day 1 | 1 Nephi 1, 1 Nephi 2 | 44 | 57.5464 |
| Day 2 | 1 Nephi 3, 1 Nephi 4 | 69 | 303.2496 |
| Day 3 | 1 Nephi 5, 1 Nephi 6, 1 Nephi 7 | 50 | 2.5152 |
| Day 4 | 1 Nephi 8, 1 Nephi 9 | 44 | 57.5464 |
| Day 5 | 1 Nephi 10, 1 Nephi 11 | 58 | 41.1402 |
| Day 6 | 1 Nephi 12, 1 Nephi 13 | 65 | 179.9371 |
| Day 7 | 1 Nephi 14, 1 Nephi 15 | 66 | 207.7652 |
| Day 8 | 1 Nephi 16 | 39 | 158.4058 |
| Day 9 | 1 Nephi 17 | 55 | 11.6558 |
| Day 10 | 1 Nephi 18, 1 Nephi 19 | 49 | 6.6871 |
| Day 11 | 1 Nephi 20, 1 Nephi 21 | 48 | 12.8589 |
| Day 12 | 1 Nephi 22, 2 Nephi 1 | 63 | 130.2808 |
| Day 13 | 2 Nephi 2, 2 Nephi 3 | 55 | 11.6558 |
| Day 14 | 2 Nephi 4, 2 Nephi 5 | 69 | 303.2496 |
| Day 15 | 2 Nephi 6, 2 Nephi 7, 2 Nephi 8 | 54 | 5.8277 |
| Day 16 | 2 Nephi 9 | 54 | 5.8277 |
| Day 17 | 2 Nephi 10, 2 Nephi 11, 2 Nephi 12 | 55 | 11.6558 |
| Day 18 | 2 Nephi 13, 2 Nephi 14, 2 Nephi 15 | 62 | 108.4527 |
| Day 19 | 2 Nephi 16, 2 Nephi 17 | 38 | 184.5777 |
| Day 20 | 2 Nephi 18, 2 Nephi 19 | 43 | 73.7183 |
| Day 21 | 2 Nephi 20, 2 Nephi 21, 2 Nephi 22 | 56 | 19.4839 |
| Day 22 | 2 Nephi 23, 2 Nephi 24 | 54 | 5.8277 |
| Day 23 | 2 Nephi 25, 2 Nephi 26 | 63 | 130.2808 |
| Day 24 | 2 Nephi 27, 2 Nephi 28 | 67 | 237.5933 |
| Day 25 | 2 Nephi 29, 2 Nephi 30, 2 Nephi 31 | 53 | 1.9996 |
| Day 26 | 2 Nephi 32, 2 Nephi 33, Jacob 1 | 43 | 73.7183 |
| Day 27 | Jacob 2, Jacob 3, Jacob 4 | 67 | 237.5933 |
| Day 28 | Jacob 5 | 77 | 645.8746 |
| Day 29 | Jacob 6, Jacob 7 | 40 | 134.2339 |
| Day 30 | Enos 1, Jarom 1 | 42 | 91.8902 |
| Day 31 | Omni 1, Words of Mormon 1 | 48 | 12.8589 |
| Day 32 | Mosiah 1, Mosiah 2 | 59 | 54.9683 |
| Day 33 | Mosiah 3, Mosiah 4 | 57 | 29.3121 |
| Day 34 | Mosiah 5, Mosiah 6, Mosiah 7 | 55 | 11.6558 |
| Day 35 | Mosiah 8, Mosiah 9 | 40 | 134.2339 |
| Day 36 | Mosiah 10, Mosiah 11 | 51 | 0.3433 |
| Day 37 | Mosiah 12 | 37 | 212.7496 |
| Day 38 | Mosiah 13, Mosiah 14 | 47 | 21.0308 |
| Day 39 | Mosiah 15, Mosiah 16 | 46 | 31.2027 |
| Day 40 | Mosiah 17, Mosiah 18 | 55 | 11.6558 |
| Day 41 | Mosiah 19, Mosiah 20 | 55 | 11.6558 |
| Day 42 | Mosiah 21, Mosiah 22 | 52 | 0.1714 |
| Day 43 | Mosiah 23 | 39 | 158.4058 |
| Day 44 | Mosiah 24, Mosiah 25 | 49 | 6.6871 |
| Day 45 | Mosiah 26 | 39 | 158.4058 |
| Day 46 | Mosiah 27, Mosiah 28 | 57 | 29.3121 |
| Day 47 | Mosiah 29 | 47 | 21.0308 |
| Day 48 | Alma 1 | 33 | 345.4371 |
| Day 49 | Alma 2 | 38 | 184.5777 |
| Day 50 | Alma 3, Alma 4 | 47 | 21.0308 |
| Day 51 | Alma 5 | 62 | 108.4527 |
| Day 52 | Alma 6, Alma 7, Alma 8 | 67 | 237.5933 |
| Day 53 | Alma 9, Alma 10 | 66 | 207.7652 |
| Day 54 | Alma 11 | 46 | 31.2027 |
| Day 55 | Alma 12, Alma 13 | 68 | 269.4214 |
| Day 56 | Alma 14, Alma 15 | 48 | 12.8589 |
| Day 57 | Alma 16, Alma 17 | 60 | 70.7964 |
| Day 58 | Alma 18 | 43 | 73.7183 |
| Day 59 | Alma 19, Alma 20 | 66 | 207.7652 |
| Day 60 | Alma 21, Alma 22 | 58 | 41.1402 |
| Day 61 | Alma 23, Alma 24 | 48 | 12.8589 |
| Day 62 | Alma 25, Alma 26 | 54 | 5.8277 |
| Day 63 | Alma 27, Alma 28, Alma 29 | 61 | 88.6246 |
| Day 64 | Alma 30 | 60 | 70.7964 |
| Day 65 | Alma 31 | 38 | 184.5777 |
| Day 66 | Alma 32 | 43 | 73.7183 |
| Day 67 | Alma 33, Alma 34 | 64 | 154.1089 |
| Day 68 | Alma 35, Alma 36 | 46 | 31.2027 |
| Day 69 | Alma 37 | 47 | 21.0308 |
| Day 70 | Alma 38, Alma 39, Alma 40 | 60 | 70.7964 |
| Day 71 | Alma 41, Alma 42 | 46 | 31.2027 |
| Day 72 | Alma 43 | 54 | 5.8277 |
| Day 73 | Alma 44, Alma 45 | 48 | 12.8589 |
| Day 74 | Alma 46 | 41 | 112.0621 |
| Day 75 | Alma 47 | 36 | 242.9214 |
| Day 76 | Alma 48, Alma 49 | 55 | 11.6558 |
| Day 77 | Alma 50 | 40 | 134.2339 |
| Day 78 | Alma 51 | 37 | 212.7496 |
| Day 79 | Alma 52, Alma 53 | 63 | 130.2808 |
| Day 80 | Alma 54, Alma 55 | 59 | 54.9683 |
| Day 81 | Alma 56 | 57 | 29.3121 |
| Day 82 | Alma 57 | 36 | 242.9214 |
| Day 83 | Alma 58, Alma 59 | 54 | 5.8277 |
| Day 84 | Alma 60, Alma 61 | 57 | 29.3121 |
| Day 85 | Alma 62 | 52 | 0.1714 |
| Day 86 | Alma 63, Helaman 1, Helaman 2 | 65 | 179.9371 |
| Day 87 | Helaman 3, Helaman 4 | 63 | 130.2808 |
| Day 88 | Helaman 5 | 52 | 0.1714 |
| Day 89 | Helaman 6 | 41 | 112.0621 |
| Day 90 | Helaman 7, Helaman 8 | 57 | 29.3121 |
| Day 91 | Helaman 9 | 41 | 112.0621 |
| Day 92 | Helaman 10, Helaman 11 | 57 | 29.3121 |
| Day 93 | Helaman 12, Helaman 13 | 65 | 179.9371 |
| Day 94 | Helaman 14, Helaman 15 | 48 | 12.8589 |
| Day 95 | Helaman 16, 3 Nephi 1 | 55 | 11.6558 |
| Day 96 | 3 Nephi 2, 3 Nephi 3 | 45 | 43.3746 |
| Day 97 | 3 Nephi 4, 3 Nephi 5 | 59 | 54.9683 |
| Day 98 | 3 Nephi 6, 3 Nephi 7 | 56 | 19.4839 |
| Day 99 | 3 Nephi 8, 3 Nephi 9 | 47 | 21.0308 |
| Day 100 | 3 Nephi 10, 3 Nephi 11 | 60 | 70.7964 |
| Day 101 | 3 Nephi 12 | 48 | 12.8589 |
| Day 102 | 3 Nephi 13, 3 Nephi 14 | 61 | 88.6246 |
| Day 103 | 3 Nephi 15, 3 Nephi 16 | 44 | 57.5464 |
| Day 104 | 3 Nephi 17, 3 Nephi 18 | 64 | 154.1089 |
| Day 105 | 3 Nephi 19 | 36 | 242.9214 |
| Day 106 | 3 Nephi 20 | 46 | 31.2027 |
| Day 107 | 3 Nephi 21, 3 Nephi 22 | 46 | 31.2027 |
| Day 108 | 3 Nephi 23, 3 Nephi 24, 3 Nephi 25 | 38 | 184.5777 |
| Day 109 | 3 Nephi 26, 3 Nephi 27 | 54 | 5.8277 |
| Day 110 | 3 Nephi 28, 3 Nephi 29, 3 Nephi 30 | 50 | 2.5152 |
| Day 111 | 4 Nephi 1 | 49 | 6.6871 |
| Day 112 | Mormon 1, Mormon 2 | 48 | 12.8589 |
| Day 113 | Mormon 3, Mormon 4 | 45 | 43.3746 |
| Day 114 | Mormon 5, Mormon 6 | 46 | 31.2027 |
| Day 115 | Mormon 7, Mormon 8 | 51 | 0.3433 |
| Day 116 | Mormon 9 | 37 | 212.7496 |
| Day 117 | Ether 1 | 43 | 73.7183 |
| Day 118 | Ether 2, Ether 3 | 53 | 1.9996 |
| Day 119 | Ether 4, Ether 5, Ether 6 | 55 | 11.6558 |
| Day 120 | Ether 7, Ether 8 | 53 | 1.9996 |
| Day 121 | Ether 9 | 35 | 275.0933 |
| Day 122 | Ether 10, Ether 11 | 57 | 29.3121 |
| Day 123 | Ether 12 | 41 | 112.0621 |
| Day 124 | Ether 13, Ether 14 | 62 | 108.4527 |
| Day 125 | Ether 15, Moroni 1, Moroni 2, Moroni 3, Moroni 4, Moroni 5 | 50 | 2.5152 |
| Day 126 | Moroni 6, Moroni 7 | 57 | 29.3121 |
| Day 127 | Moroni 8, Moroni 9 | 56 | 19.4839 |
| Day 128 | Moroni 10 | 34 | 309.2652 |
References
- Optimization Challenge, http://r.789695.n4.nabble.com/optimization-challenge-td1012344.html
- Book of Mormon, https://en.wikipedia.org/wiki/Book_of_Mormon
- Optimal read list for given number of days, https://www.geeksforgeeks.org/optimal-read-list-given-number-days/
- Modeling vs Programming, GAMS vs Python, http://yetanothermathprogrammingconsultant.blogspot.com/2018/02/modeling-vs-programming-python-vs-gams.html

-Portrait-Portr_12193.tif/lossy-page1-330px-ETH-BIB-Waerden%2C_Bartel_Leendert_van_der_(1903-1996)-Portrait-Portr_12193.tif.jpg)